|
I am an incoming Research Fellow at Harvard Medical School - MGH at the Deep Neurophenotyping Lab led by Dr. Anoopum Gupta. Previously, I worked as a Machine Learning Scientist at Eli Lilly and Company (India) where I worked on machine learning and computer vision, with a focus on Image Segmentation. I completed my Ph.D. in Computer Science and Engineering at Indian Institute of Technology (IIT) Guwahati with a focus in Machine Learning and Robotics. I was part of Robotics Lab., and Prof. Shivashankar B. Nair was my Thesis Advisor. In my doctoral thesis, I focused on fusion of Bio-Inspired techniques and Machine Learning applied to Robotics. My focus was also on transfer learning in deep networks. One of my works, "An Immuno-Inspired Transfer Learning Paradigm" won the Best student paper award at the IEEE Congress on Evolutionary Computation Conference in 2021. I am annotating some Computer Vision papers both classic (the OG) and the latest ones. You can find my annotated papers here Email / CV / Google Scholar / Twitter / Github |

|
|
|
I'm interested in computer vision, machine learning, Bio-Inspired techniques and Embodied Machine Learning applied to Robotics. Representative papers are highlighted. |
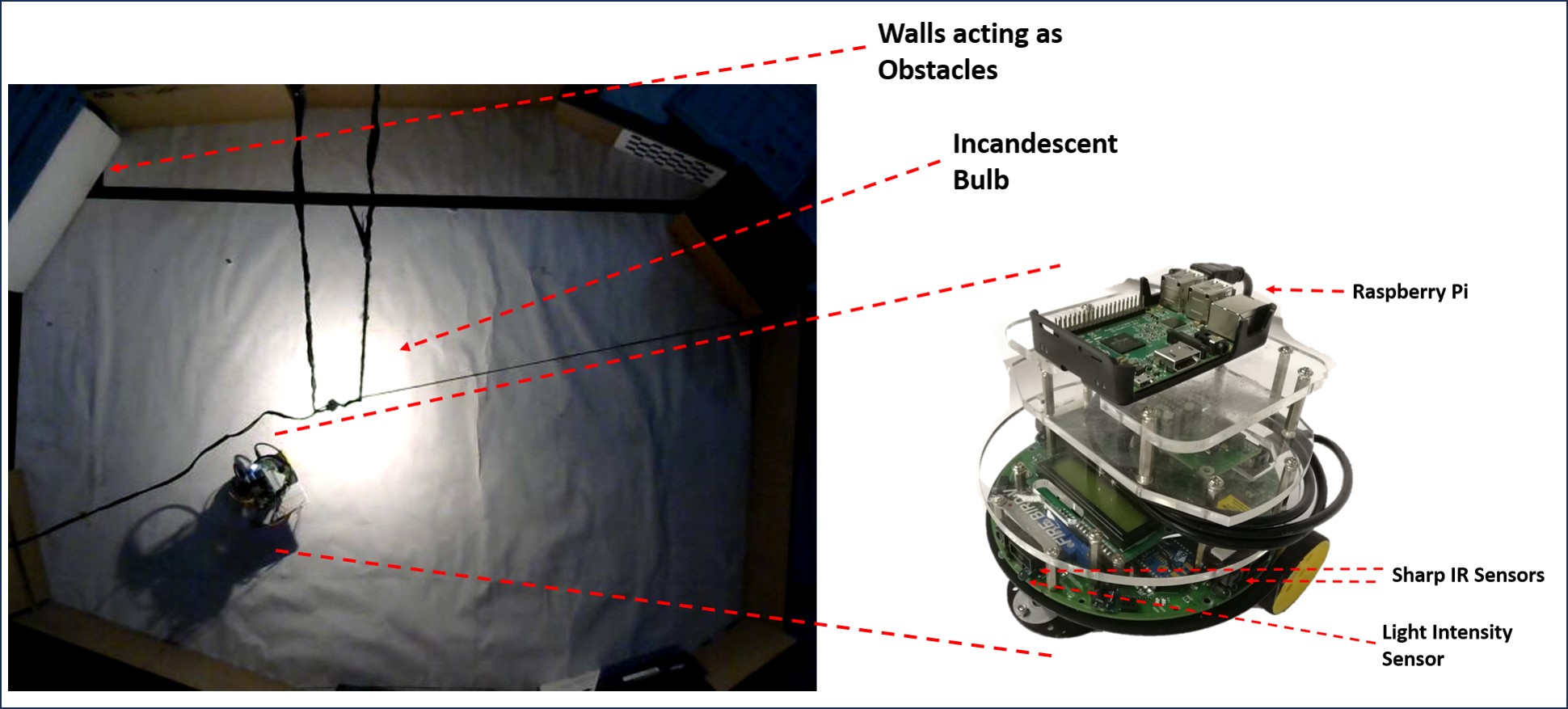 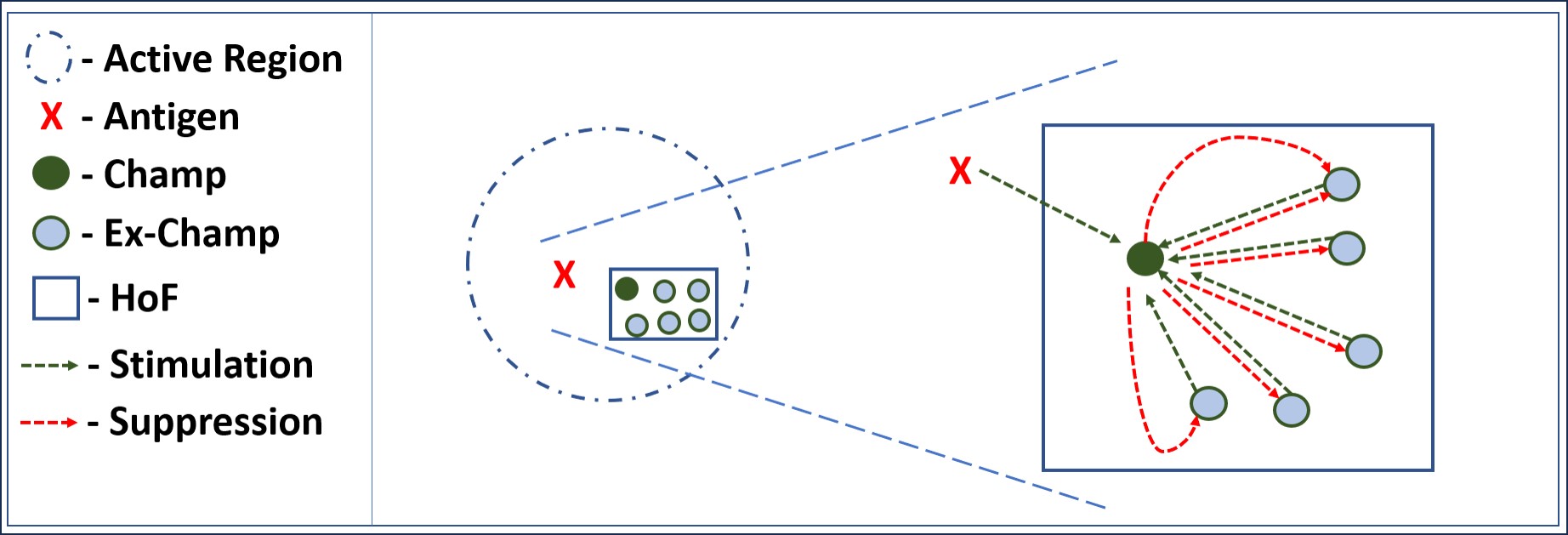 |
Divya D. Kulkarni, Shivashankar B. Nair Swarm and Evolutionary Computation (Journal) Impact Factor: 10.267, 2022 Code / Paper This work proposes a technique to cache the better performing robot controllers in Halls of Fame. Each Hall of Fame is associated with one of the sub regions in the space where the robot is situated. The method proposed does not set the number of controllers apriori but dynamically as per the dynamics of the system. |
|
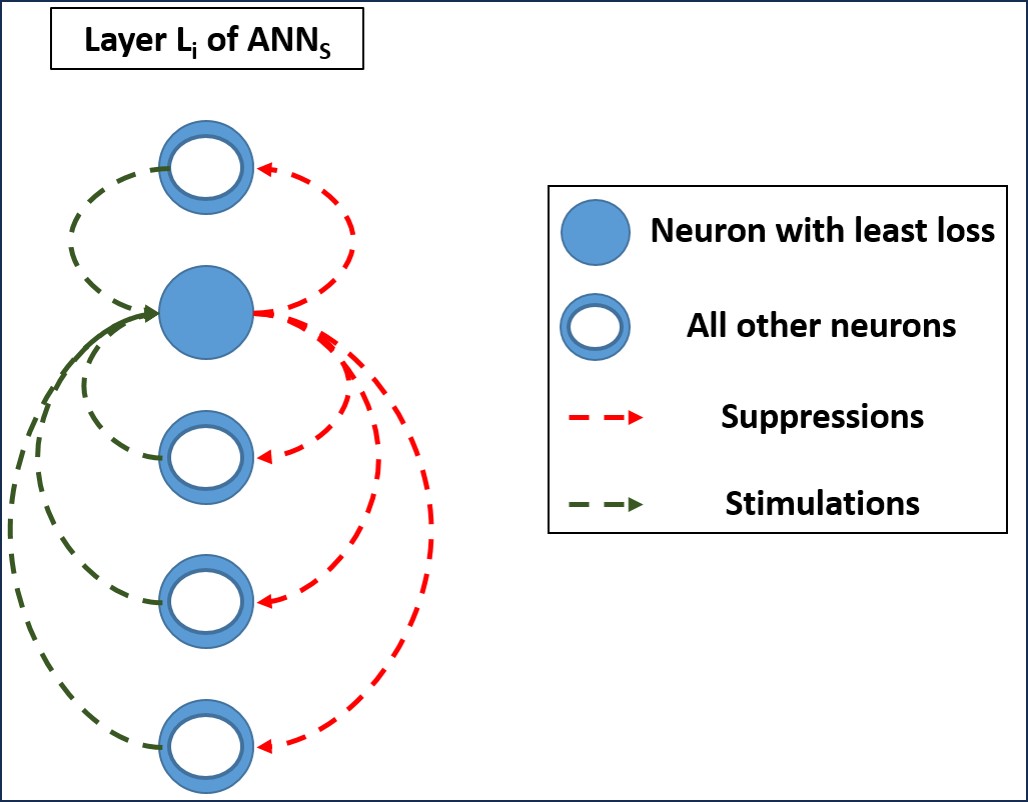
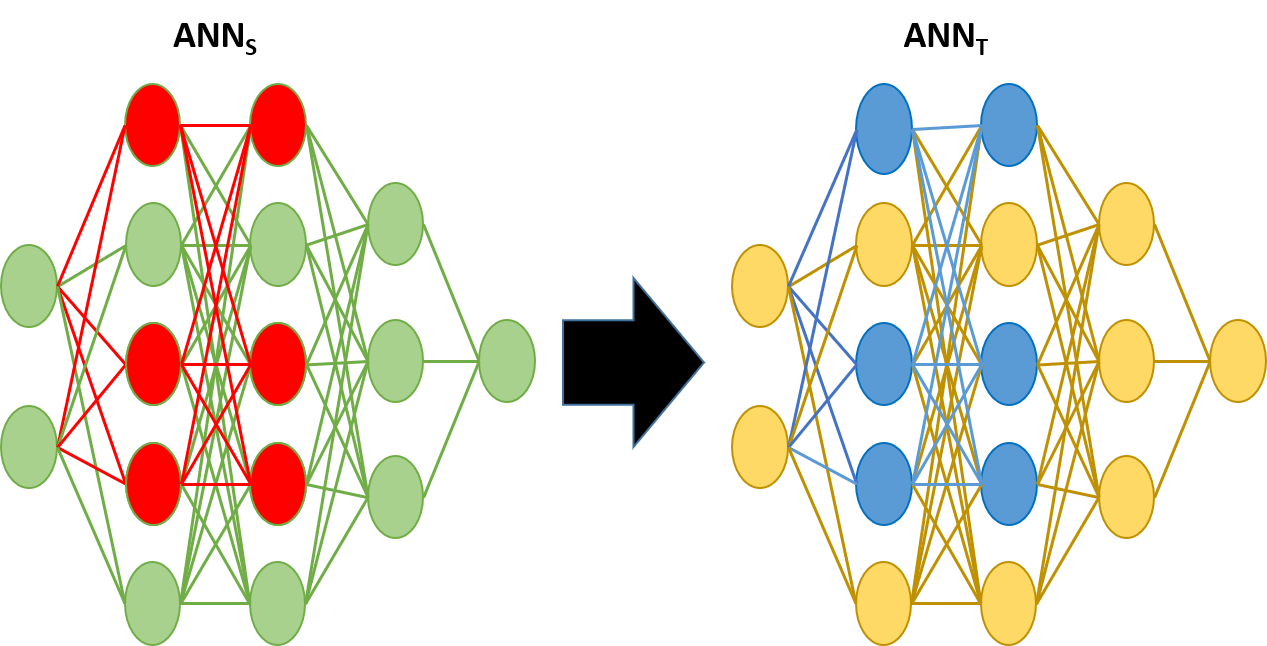
Divya D. Kulkarni, Shivashankar B. Nair IEEE Congress on Evolutionary Computation (CORE Rank - B) Kraków, Poland, 2021 Code / Paper This work proposes a neuronal transfer learning paradigm where instead of layers, neurons are transferred from one network to another. Identification of which neurons are to be transferred are governed by an Immuno-Inspired technique. |
  |
Divya D. Kulkarni, Shivashankar B. Nair Neuroevolution at Work, Genetic and Evolutionary Computation Conference (GECCO) (CORE Rank A) Cancún, Mexico, 2020 Code / Paper This work proposes directed mutation based on quanta of Puissancesassociated with weights of the Artificial Neural Network in the process of Neuroevolution. |
  |
Akul Agrawal, Divya D. Kulkarni, Shivashankar B. Nair IEEE International Conference on Systems, Man, and Cybernetics (SMC) (CORE Rank B) Toronto, Canada, 2020 Code / Paper This work presents an approach to de-centralize Federated Learning using mobile agents coupled with the Federated Averaging (FedAvg) algorithm. A hybrid model that combines both centralized and decentralized approaches has also been presented. Results obtained by running the model on different network topologies indicate that the hybrid version proves to be the better option for an FL implementation. |
  |
Ishita, Divya D. Kulkarni, Tushar Semwal, Shivashankar B. Nair Second International Conference on Advanced Computational and Communication Paradigms (ICACCP) Gangtok, India, 2019 Code / Paper The work proposes an approach that uses a Smart Contract to allocate resources and monitor the execution of the task(s) by a set of mobile agents. The transactions within the blockchain are used to detect the Byzantine mobile agents that could execute unauthorized tasks and inflict losses within a system. Stealthy mobile agents, who are not registered with the Smart Contract, hindering the execution of the task are also contained. |
  |
Tushar Semwal, Divya D. Kulkarni, Shivashankar B. Nair Genetic and Evolutionary Computation Conference (GECCO) (CORE Rank A) Kyoto, Japan, 2018 Code / Paper This work proposes an immunology-inspired embodied action-evolution cum selection algorithm that can cater to distributed ER. The algorithm evolves different subcontrollers for different portions of the search space in a distributed manner just as antibodies are evolved and primed for different antigens in the antigenic space. |
  |
Menaxi J Bagchi, Divya D. Kulkarni, Shivashankar B. Nair, Pradip K. Das Sixth IEEE International Conference on Robotic Computing (IRC) Naples, Italy, 2022 Code / Paper In this work, we propose a mechanism that uses the concept of dataflow computing coupled with mobile agent technology, to ensure that new jobs can be added online with minimal interference to the currently executing jobs. The entire system need not be brought to a standstill because of the addition and execution of the new jobs. The proposed mechanism facilitates simultaneous executions of the new jobs along with the ones currently executing. |
  |
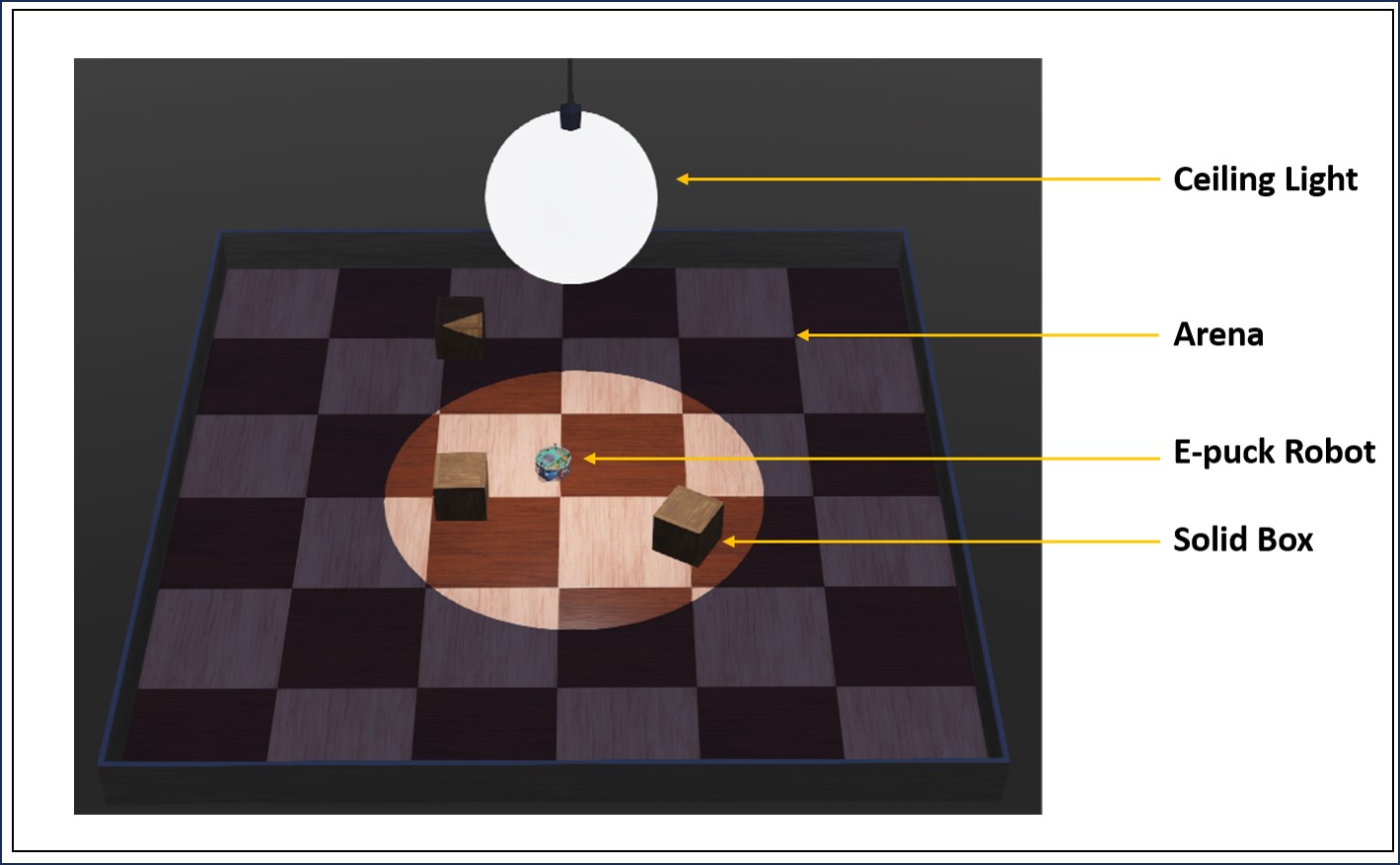
Jayprakash S. Nair, Divya D. Kulkarni, Ajitem Joshi, Sruthy Suresh 7th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM) Ioannina, Greece, 2022 Code / Paper This work describes a mobile agent based paradigm to decentralize FL in multi-robot scenarios. Using Webots, a popular free open-source robot simulator, and Tartarus, a mobile agent platform, we present a methodology to decentralize federated learning in a set of connected robots. With Webots running on different connected computing systems, we show how mobile agents can perform the task of Decentralized Federated Reinforcement Learning (dFRL). |
  |
Divya D. Kulkarni, Shivashankar B. Nair International Conference on Society with Future:Smart and Liveable Cities Braga, Portugal, 2019 Code / Paper In this work, we propose an IoT based agrilogistic system coupled with a genetic programming algorithm to ensure fair prices across all the participants within. The system evolves and generates a set of programs that, in turn, generates the selling rate for every participant in the supply chain in a manner that confers fairness. |
|
|
|